
 Playlist:
THPT QG Vật lý - Chuyên đề Dao động...
Playlist:
THPT QG Vật lý - Chuyên đề Dao động...
-
Bài 1: Tìm khoảng đơn điệu của hàm số

Bài 1: Tìm khoảng đơn điệu của hàm số
Bài giảng sẽ giúp các em nắm được kiến thức cơ bản về cách tìm khoảng đơn điệu của hàm số như: Định nghĩa Điều kiện đủ để hàm số đơn điệu Các bước tìm khoảng đơn điệu của hàm số00:55:29 5743 TS. Phạm Sỹ Nam
-
Bài 2: Tìm tham số để hàm số đơn điệu trên một miền

Bài 2: Tìm tham số để hàm số đơn điệu trên một miền
Bài giảng sẽ giúp các em nắm được kiến thức cơ bản về cách tìm tham số để hàm số đơn điệu trên một miền như: Công thức tính. Điều kiện đủ để hàm số đơn điệu trên một miền.00:28:42 1174 TS. Phạm Sỹ Nam
-
Bài 3: Ứng dụng tính đơn điệu giải phương trình

Bài 3: Ứng dụng tính đơn điệu giải phương trình
Bài giảng sẽ giúp các em nắm kỹ hơn về lý thuyết và một số ví dụ cụ thể về ứng dụng tính đơn điệu giải phương trình.00:32:49 1212 TS. Phạm Sỹ Nam
-
Bài 4: Ứng dụng tính đơn điệu giải bất phương trình

Bài 4: Ứng dụng tính đơn điệu giải bất phương trình
Bài giảng Ứng dụng tính đơn điệu giải bất phương trình sẽ giúp các em nắm được lý thuyết và bài tập để các em củng cố kiến thức.00:32:29 998 TS. Phạm Sỹ Nam
-
Bài 5: Ứng dụng tính đơn điệu giải hệ phương trình

Bài 5: Ứng dụng tính đơn điệu giải hệ phương trình
Bài giảng Ứng dụng tính đơn điệu giải hệ phương trình sẽ giúp các em nắm kỹ hơn cách giải hệ phương trình, cách tìm tính nghịch biến, đồng biến về tính đơn điệu của hệ phương trình.00:29:14 1084 TS. Phạm Sỹ Nam
-
Bài 6: Ứng dụng tính đơn điệu chứng minh bất đẳng thức

Bài 6: Ứng dụng tính đơn điệu chứng minh bất đẳng thức
Bài giảng ứng dụng tính đơn điệu chứng minh bất đẳng thức gồm có 2 phần nội dung chính: Lý thuyết Các ví dụ cụ thể nhằm giúp các em chứng minh được đồng biến và nghịch biến.00:43:58 1274 TS. Phạm Sỹ Nam
I. Cấu tạo
Gồm:
- 1 lò xo nhẹ, độ cứng k.
- Quả cầu khối lượng m.
II. Khảo sát chuyển động của con lắc lò xo
1. Con lắc lò xo nằm ngang
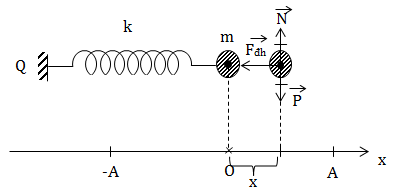
Theo đinh luật II Niuton: \(\sum \overrightarrow{F} = m\overrightarrow{a}\)
Hay: \(\overrightarrow{P} + \overrightarrow{N} + \overrightarrow{F_{dh}} = m \overrightarrow{a} \ (\ast )\)
Chiếu (*) lên Ox: Fdh = ma
Với \(\left\{\begin{matrix} F_{dh} = -k.x\\ a = x'' \ \ \ \ \ \ \end{matrix}\right. \ \ \Rightarrow -k.x = m.x'' \Leftrightarrow x'' = -\frac{k}{m}.x\)
Đặt \(\omega ^2 = \frac{k}{m} \Rightarrow x'' = -\omega ^2.x \ (**)\)
Nghiệm (**) có dạng: \(x = A\cos (\omega t + \varphi )\)
Vậy: Dao động của con lắc lò xo là dao động điều hòa với chu kỳ \(T = \frac{2\pi}{\omega } = 2\pi \sqrt{\frac{m}{k}}\)
2. Con lắc lò xo treo thẳng đứng
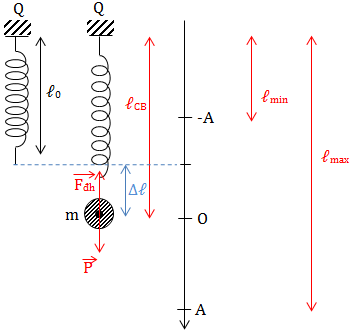
* Tại VTCB: \(\overrightarrow{F_{dh}} + \overrightarrow{P} = \overrightarrow{O} \Rightarrow F_{dh} = P\)
\(\Rightarrow k.\Delta \ell = mg \Rightarrow \left\{\begin{matrix} \Delta \ell = \frac{mg}{k} \ \ \ \ \ \ \\ \omega ^2=\frac{k}{m} = \frac{g}{\Delta \ell } \end{matrix}\right.\)
\(\Rightarrow \left\{\begin{matrix} T = \frac{2\pi }{\omega } = 2 \pi \sqrt{\frac{k}{m}} = 2 \pi \sqrt{\frac{\Delta \ell }{g}} \\ f = \frac{1}{T} = \frac{\omega }{2 \pi} = \frac{1}{2 \pi}\sqrt{\frac{k}{m}} = \frac{1}{2 \pi}\sqrt{\frac{g}{\Delta \ell}} \end{matrix}\right.\)
* Chú ý: Đối với con lắc lò xo thì chu kỳ (T) tần số (f) không phụ thuộc g và \(\Delta \ell\)
\(\cdot \ \ell _{CB} = \ell _{o} + \Delta \ell\)
\(\left.\begin{matrix} \cdot \ \ell _{max} = \ell _{CB} + A \\ \cdot \ \ell _{min} = \ell _{CB} - A \\ \end{matrix}\right\} \Rightarrow \left\{\begin{matrix} \ell _{CB} = \frac{\ell _{max} + \ell _{min}}{2}\\ A = \frac{\ell _{max} - \ell _{min}}{2} \ \ \ \end{matrix}\right.\)
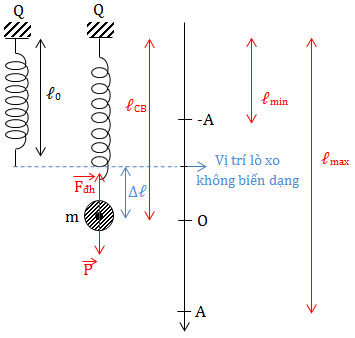
* Lực đàn hồi: Là lực sinh ra khi lò xo bị biến dạng, \(\overrightarrow{F_{dh}}\) luôn hướng về vị trí lò xo không biến dạng, có độ lớn tỉ lệ với độ biến dạng của lò xo.
* Biểu thức: \(F_{dh} = kX\)
Với k: độ cứng (N/m); x: độ biến dạng (m)
\(F_{dh \ max} = kX_{max} = k(\Delta \ell + A)\)
\(F_{dh\ min} = \left\{\begin{matrix} 0\ neu \ A \geq \Delta \ell\ \hspace{1,5cm}\\ k(\Delta \ell - A) \ neu \ A < \Delta \ell \end{matrix}\right.\)
3. Con lắc lò xo nằm nghiêng
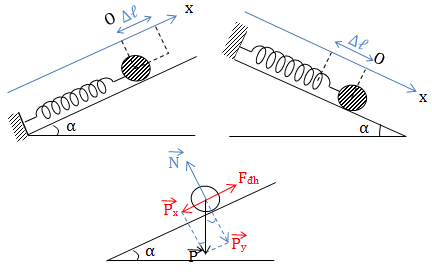
Tại VTCB: \(\overrightarrow{P} + \overrightarrow{N} + \overrightarrow{F_{dh}} = \overrightarrow{O}\)
\(\Rightarrow P_X = F_{dh}\) với \(\left\{\begin{matrix} P_x = m.g\sin \alpha \\ F_{dh} = k.\Delta \ell \end{matrix}\right.\)
\(\Rightarrow k.\Delta \ell = m.g\sin \alpha\)
\(\Rightarrow \omega ^2 = \frac{k}{m}=\frac{g.\sin \alpha }{\Delta \ell}\)
\(\cdot \ T = \frac{2 \pi}{\omega } = 2 \pi \sqrt{\frac{k}{m}} = 2 \pi \sqrt{\frac{\Delta \ell }{g\sin \alpha }}\)
\(\cdot \ f = \frac{\omega }{2 \pi } = \frac{1}{2 \pi} \sqrt{\frac{k}{m}} = \frac{1}{2 \pi} \sqrt{\frac{g\sin \alpha }{\Delta \ell}}\)
Nhận xét:
(1) Đối với con lắc lò xo nằm ngang:
\(\overrightarrow{F_{dh}} = \overrightarrow{F_{hp}}\) (VTCB trùng với vị trí lò xo không biến dạng)
(2) Đối với con lắc lò xo thẳng đứng, nằm nghiêng:
\(\overrightarrow{F_{dh}} \neq \overrightarrow{F_{hp}}\) (VTCB khác với vị trí lò xo không biến dạng)
\(\Rightarrow \overrightarrow{F_{hp}} = \overrightarrow{F_{dh}} + \overrightarrow{P}\) (con lắc lò xo thẳng đứng)


